Thread Synchronization with Condition Variables or Tasks
In case you use promise and future to synchronize threads, they have much in common with condition variables. But most of the time, tasks are the better choice.
Synchronization of threads
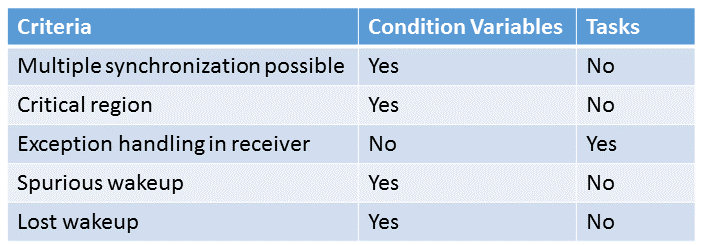
To get the big picture, get the facts. The table compares condition variables with tasks (promise and future).
The benefit of a condition variable to a promise and future is that you can use condition variables to synchronize threads multiple times. In opposite to that, a promise can send its notification only once. So you have to use more promise and future pairs to get the functionality of a condition variable. But if you use the condition variable only for one synchronization, the condition variable is a lot more challenging to use correctly. So a promise and future pair need no shared variable and, therefore, no lock; they are not prone to spurious or lost wakeups. In addition to that, they can handle exceptions. So there are a lot of reasons to prefer tasks to condition variables.
How can I use tasks to synchronize threads?
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 |
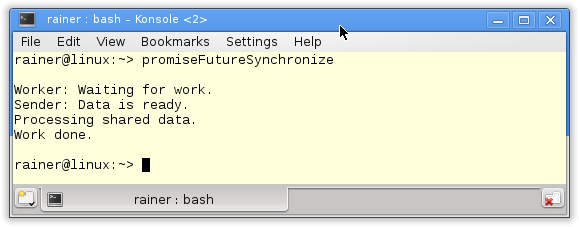
// promiseFutureSynchronize.cpp #include <future> #include <iostream> #include <utility> void doTheWork(){ std::cout << "Processing shared data." << std::endl; } void waitingForWork(std::future<void>&& fut){ std::cout << "Worker: Waiting for work." << std::endl; fut.wait(); doTheWork(); std::cout << "Work done." << std::endl; } void setDataReady(std::promise<void>&& prom){ std::cout << "Sender: Data is ready." << std::endl; prom.set_value(); } int main(){ std::cout << std::endl; std::promise<void> sendReady; auto fut= sendReady.get_future(); std::thread t1(waitingForWork,std::move(fut)); std::thread t2(setDataReady,std::move(sendReady)); t1.join(); t2.join(); std::cout << std::endl; } |
Quite easy.
With the help of the promise sendReady (line 32), I get the future fut (line 34). The promise signalizes, in this case by his return value void (std::promise<void> sendReady), that it can only send notifications. Both communications endpoints are moved into the threads t1 respectively t2 (lines 35 and 36). The future is waiting with its call fut.wait() (line 15) for the notification of the promise: prom.set_value() (line 24).
 Modernes C++ Mentoring
Modernes C++ Mentoring
Do you want to stay informed: Subscribe.
Also, the structure as the program’s output matches the program in den post about the condition variable.
What’s next?
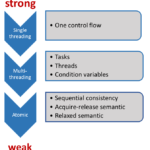
So that was the overview of the multithreading interface. Now it’s time to have a deeper look into multithreading in C++. Although most programmers will and should never use the features of the C++ memory model, it gives you a deeper insight into the challenges of multithreading programming. The next post starts with an overview of the C++ memory model. (Proofreader Alexey Elymanov)
Thanks a lot to my Patreon Supporters: Matt Braun, Roman Postanciuc, Tobias Zindl, G Prvulovic, Reinhold Dröge, Abernitzke, Frank Grimm, Sakib, Broeserl, António Pina, Sergey Agafyin, Андрей Бурмистров, Jake, GS, Lawton Shoemake, Jozo Leko, John Breland, Venkat Nandam, Jose Francisco, Douglas Tinkham, Kuchlong Kuchlong, Robert Blanch, Truels Wissneth, Mario Luoni, Friedrich Huber, lennonli, Pramod Tikare Muralidhara, Peter Ware, Daniel Hufschläger, Alessandro Pezzato, Bob Perry, Satish Vangipuram, Andi Ireland, Richard Ohnemus, Michael Dunsky, Leo Goodstadt, John Wiederhirn, Yacob Cohen-Arazi, Florian Tischler, Robin Furness, Michael Young, Holger Detering, Bernd Mühlhaus, Stephen Kelley, Kyle Dean, Tusar Palauri, Juan Dent, George Liao, Daniel Ceperley, Jon T Hess, Stephen Totten, Wolfgang Fütterer, Matthias Grün, Ben Atakora, Ann Shatoff, Rob North, Bhavith C Achar, Marco Parri Empoli, Philipp Lenk, Charles-Jianye Chen, Keith Jeffery, Matt Godbolt, Honey Sukesan, bruce_lee_wayne, Silviu Ardelean, schnapper79, Seeker, and Sundareswaran Senthilvel.
Thanks, in particular, to Jon Hess, Lakshman, Christian Wittenhorst, Sherhy Pyton, Dendi Suhubdy, Sudhakar Belagurusamy, Richard Sargeant, Rusty Fleming, John Nebel, Mipko, Alicja Kaminska, Slavko Radman, and David Poole.
| My special thanks to Embarcadero |  |
| My special thanks to PVS-Studio |  |
| My special thanks to Tipi.build |  |
| My special thanks to Take Up Code |  |
| My special thanks to SHAVEDYAKS |
Modernes C++ GmbH
Modernes C++ Mentoring (English)
Rainer Grimm
Yalovastraße 20
72108 Rottenburg
Mail: schulung@ModernesCpp.de
Mentoring: www.ModernesCpp.org






Leave a Reply
Want to join the discussion?Feel free to contribute!